Announcing async-openai-wasm, and thoughts on wasmization and streams
Async Rust library for interacting with OpenAI's APIs on WASM and how I did it
中文版请见链接
Today, I’m excited to announce the release of async-openai-wasm 🎉
async-openai-wasm is a fork of async-openai and now has stable support for WebAssembly. With it, you can interact with OpenAI’s APIs and use it in your WebAssembly projects. It targets wasm32-unknown-unknown, so basically you can use it in any WebAssembly projects. For example, you can now ship frontend-only apps that have AI superpowers without a backend server. You can also develop AI agents that run on edge functions like those on Cloudflare Workers.
HELP WANTED:
If you are interested in contributing, please check out the GitHub repository.
For now, the most wanted is to bring back
backofffor exponential backing off requests, which is incompatible withwasm32-unknown-unknowndue to the use oftokio/async-stdfunctions.
Well, the above is basically all the announcement, but this is only What, let’s talk about Why and How.
Why async-openai-wasm
async-openai is an awesome crate that allows you to interact with OpenAI’s APIs in async Rust. However, it doesn’t have stable support for WebAssembly. I’ve been maintaining an experimental branch of it, in which WebAssembly is supported behind a feature gate. However, that means to use it in a WASM project, you need to download the crate by specifying the git repository and branch in your Cargo.toml. That also prevents you to publish your project that depends on WASM feature of async-openai to crates.io.
How to wasmize async-openai
When it comes to the combination of async Rust and WebAssembly, the first major problem is often async runtimes, like tokio, which usually have no or very limited support for WebAssembly.
In the case of async-openai, getting rid of tokio was ultimately reduced to one function stream that transforms an EventSource into a Stream of responses.
/// Request which responds with SSE.
pub(crate) async fn stream<O>(
mut event_source: EventSource,
) -> Pin<Box<dyn Stream<Item = Result<O, OpenAIError>> + Send>>
where
O: DeserializeOwned + std::marker::Send + 'static,
{
let (tx, rx) = tokio::sync::mpsc::unbounded_channel();
tokio::spawn(async move {
while let Some(ev) = event_source.next().await {
match ev {
Err(e) => {
if let Err(_e) = tx.send(Err(OpenAIError::StreamError(e.to_string()))) {
// rx dropped
break;
}
}
Ok(event) => match event {
Event::Message(message) => {
if message.data == "[DONE]" {
break;
}
let response = match serde_json::from_str::<O>(&message.data) {
Err(e) => Err(map_deserialization_error(e, message.data.as_bytes())),
Ok(output) => Ok(output),
};
if let Err(_e) = tx.send(response) {
// rx dropped
break;
}
}
Event::Open => continue,
},
}
}
event_source.close();
});
Box::pin(tokio_stream::wrappers::UnboundedReceiverStream::new(rx))
}
OpenAI uses Server-Sent Events (SSE) to stream responses. The streamed payloads conceptually flows like below:

OpenAI first sends an OPEN event to indicate the start of the stream, then sends a series of MESSAGE events, each of which contains a JSON string representing a response. Finally, it sends a MESSAGE event with a string "[DONE]" to indicate the end of the stream.
The consumer usually consumes the stream in a loop like below:
while let Some(chunk) = stream.next().await {
match chunk {
Ok(response) => {
// do something with the response
}
Err(e) => log::error!("OpenAI Error: {:?}", e),
}
}
The contract is that the stream continues with Some(O) (where O is deserialized from a string) and ends with a None.
The overall logic is simple, but the implementation is a bit involved. In the original implementation, tokio is used to spawn a task that listens to the SSE stream and sends responses to a channel. The channel receiver rx is then converted to a Stream that can be consumed by the caller. Conceptually, there are two concurrent “threads” like below:
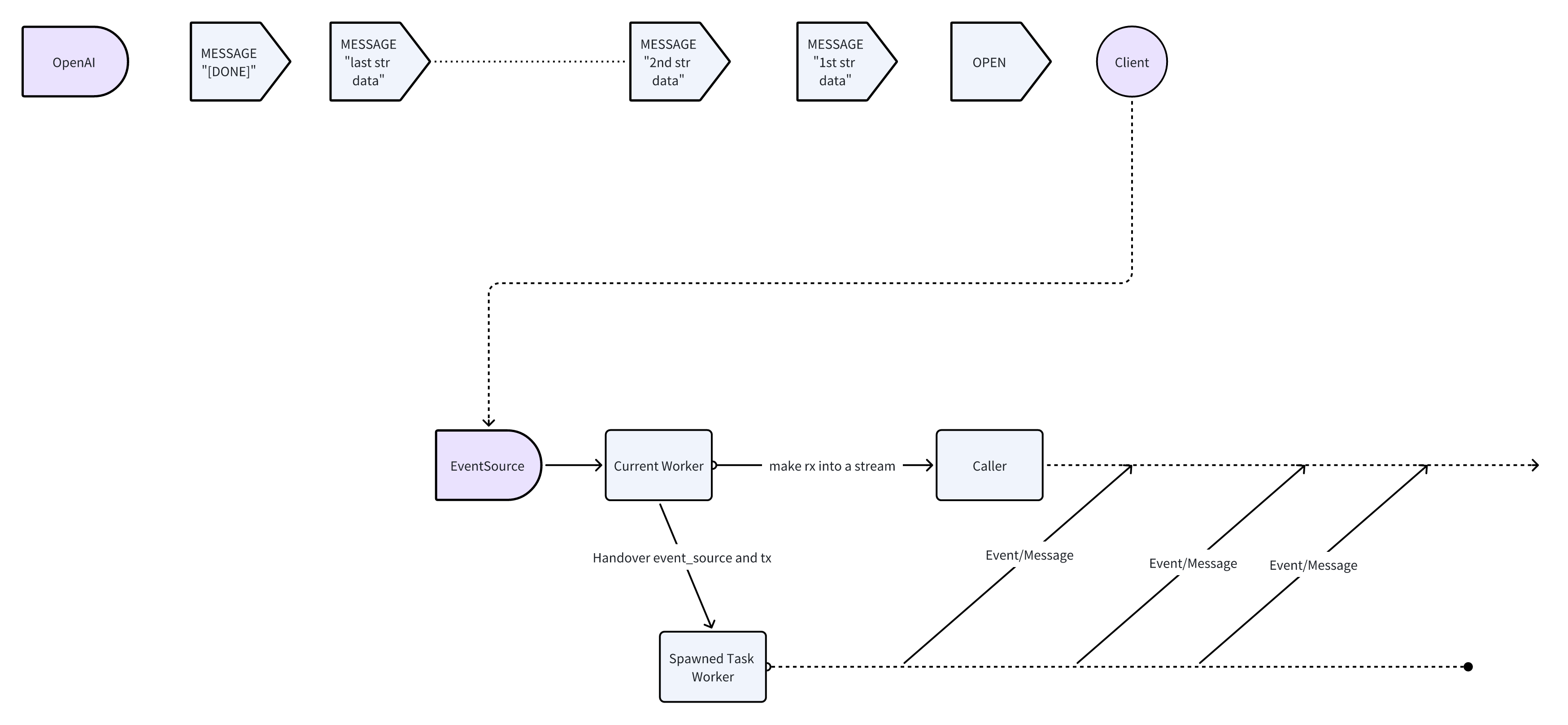
Since in essence, the function is just a transformation from EventSource to Stream, we can make a custom struct that implements Stream, which polls the EventSource and yields responses.
Here is what I made:
use futures::{stream::StreamExt, Stream};
use futures::stream::Filter;
use reqwest_eventsource::{Event, EventSource, RequestBuilderExt};
use std::future;
use std::marker::PhantomData;
use std::pin::Pin;
use std::task::{Context, Poll};
use pin_project_lite::pin_project;
pin_project! {
pub struct OpenAIEventStream<O> {
#[pin]
stream: Filter<EventSource, future::Ready<bool>, fn(&Result<Event, reqwest_eventsource::Error>) -> future::Ready<bool>>,
// to make the struct generic, which is needed for the Stream trait to customize the output type.
_phantom_data: PhantomData<O>
}
}
impl<O> OpenAIEventStream<O> {
pub(crate) fn new(event_source: EventSource) -> Self {
Self {
stream: event_source.filter(|result|
// filter out the first event which is always Event::Open
future::ready(!(result.is_ok()&&result.as_ref().unwrap().eq(&Event::Open)))
),
_phantom_data: PhantomData
}
}
}
impl<O: DeserializeOwned + Send + 'static> Stream for OpenAIEventStream<O> {
type Item = Result<O, OpenAIError>;
fn poll_next(self: Pin<&mut Self>, cx: &mut Context<'_>) -> Poll<Option<Self::Item>> {
let this = self.project();
let stream: Pin<&mut _> = this.stream;
match stream.poll_next(cx) {
Poll::Ready(response) => {
match response {
None => Poll::Ready(None), // end of the stream
Some(result) => match result {
Ok(event) => match event {
Event::Open => unreachable!(), // it has been filtered out
Event::Message(message) => {
if message.data == "[DONE]" {
Poll::Ready(None) // end of the stream, defined by OpenAI
} else {
// deserialize the data
match serde_json::from_str::<O>(&message.data) {
Err(e) => Poll::Ready(Some(Err(map_deserialization_error(e, &message.data.as_bytes())))),
Ok(output) => Poll::Ready(Some(Ok(output))),
}
}
}
}
Err(e) => Poll::Ready(Some(Err(OpenAIError::StreamError(e.to_string()))))
}
}
}
Poll::Pending => Poll::Pending
}
}
}
You can see there are many
pins, but I won’t go into details here. Forpins and futures, here is a great blog.
OpenAIEventStream<O> stores a Filter wrapping an EventSource instead. But for now let’s just focus on the poll_next method. It’s a bit more verbose, but it doesn’t require tokio.
When we poll the wrapped event source, if it is ready and returns None, then the stream exhausted and we return None to signal the end of the stream. Similarly, according to OpenAI’s API, if the data is "[DONE]", we should also return None. If we get a message that is not "[DONE]", we try to deserialize it and return the deserialized value or any errors. These results should be wrapped in Poll::Ready since the event source is indeed ready and gives us a response.
The only branch that is slightly complicated to reason about is Event::Open => .... Given that the event source is ready and gives us some results, should we return Poll::Pending or Poll::Ready? If we return Poll::Pending, the stream will be scheduled to be poll again LATER, which is not what we want. And I’ve tried this, it doesn’t work as responses are delayed significantly. So, should we return Poll::Ready? Well then we need to return something, but what? None? But it’s not the end of the stream. Then Some seems okay, but we don’t have a valid message yet.
If we think out of the above frame, we should just filter out Event::Open as the stream consumer doesn’t care about it. So, we use StreamExt::filter that is implemented by EventSource to filter out the Event::Open event. That method returns a scary Filter<EventSource, future::Ready<bool>, fn(&Result<Event, reqwest_eventsource::Error>) -> future::Ready<bool>> which we fearlessly store in OpenAIEventStream.
Now with the new OpenAIEventStream, we don’t need another spawned task to listen to the event source. We can just poll it directly and the execution is composed into the caller’s task.
For those who are curious, you can dig into
Streamimpl offutures::stream::Filterand see how it works. Simply put, in thepoll_nextmethod, it eagerly polls the inner stream in aloopand keeps looking for a result that satisfies the predicate until finding one or the stream exhausts.We could of course do that by ourselves if we don’t want to store the
FilterinOpenAIEventStream, but the code would be a lot verbose and difficult to understand.
The second challenge is related to file I/O, which is easier to solve. In the original implementation, tokio is also used to read and write files. But on wasm32-unknown-unknown, we can’t use file I/O directly, since the compiled binary may run in a browser or a serverless environment where file I/O is not allowed or not practical. So, we remove all file I/O related code and expose APIs that accept raw bytes in memory. I didn’t do this. Or more precisely, I did destructively. I just removed all file I/O related code. Thanks to the generous contributor in this PR, we have in-memory APIs now.
Closing
I hope this post gives you some insights into how to wasmize async Rust libraries. It’s not that hard, but it requires some understanding of async programming and the Rust ecosystem.
If you think you have better solutions for the above problems, please definitely let me know!
Metadata
Version: 1.0.0
Date: 2024.04.16
License: CC BY-SA 4.0